Fantje iz portala so me spodbudili da spišem članek na temo kotalnega trenja oz. mehanike oprijema pnevmatike s cestiščem. Sicer nima direktne veze z SAABi, vendar je zanimiva, ter mislim da tudi uporabna.
Začel bom kar v srednji oziroma osnovni šoli.Srednješolska fizika uči da je sila trenje produkt sile s katero telo deluje na podlago ter koeficienta trenja med podlago ter opazovanim telesom. Kar se kotalnega trenja tiče pa je povedano samo to (če sploh), da se med kotaljenjem zaradi deformacije telesa in tal prijemališče sile podlage premakne naprej za razdaljo f, ter tako ustvari moment ki nasprotuje gibanju.
V tem članku bom skušal nadgraditi razumevanje tega pojava. Razložiti bom poizkušal kaj nam kot voznikom to pomeni, ter zakaj do tega pride.
Fizikalni modelče želimo nek zapletenejši fizikalni proces opisati, ter ovrednotiti se poslužujemo fizikalnih modelov. Kompleksne probleme rešujemo tako, da med seboj interaktivno povežemo več osnovnih fizikalnih modelov, pri katerih znamo dogajanje zadosti natančno popisati. Na ta način nadomestimo zapleten proces, na več (osnovnih) procesov, ki omogočajo enostavnejšo analizo dogajanja.
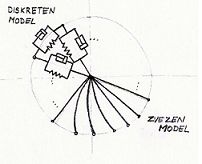
Avtomobilsko pnevmatiko si lahko (z malo domišlije) predstavljamo kot ščetine (podobno kot krtače v avtopralnici), ki so med seboj povezane z vzmetni in dušilkami. Tak fizikalni model je uporaben tudi za trše materiale (naprimer kroglice v ležajih)
če ta model še nekoliko zakompliciramo in togost in dušenje vsaki ščetini zvezno porazdelimo po dolžini, dobimo model, na katerem je deformacija pnevmatike lepo vidna
Jasno je da pnevmatika na avtomobilu pretvarja rotirajoče gibanje v ravninsko (translatorno) gibanje, pri tem pa kot pri vsakem realnem procesu spreminjanja energijske bilance nastanejo izgube. Pri tornih gonilih (kar pnevmatika je) se nam te izgube kažejo kot slip oz. zdrs pnevmatike napram tlom.
Slip bi lahko definirali kot dejansko obodno hitrost kolesa ( ) napram realni hitrosti s katero se kolo giblje npr. težišče tega kolesa. če to razmerje delimo z obodno hitrostjo ter množimo z 100% dobimo relativni zdrs ali slip.
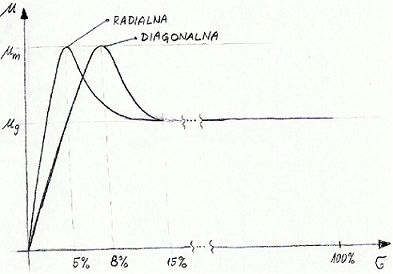
Graf je narisan do približno 15%, saj je v tem območju vse pomembno dogajanje.
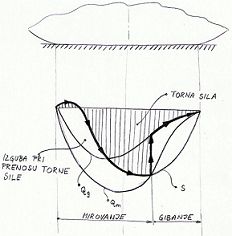
Iz diagrama je vidno, da sposobnost prenašanja sile z večanjem slipa narašča, dokler ne dosežemo maksimalne vrednosti. Tedaj kolo zdrsne, ter sposobnost prenašanja sile postane odvisna od trenja pri drsenju, ter se z večanjem slipa ne spreminja več.
Dejansko dogajanje je najlažje razumeti tako, da si predstavljamo pospeševanje avtomobila na ravni cesti. Recimo, da je maksimalna deformacija radialne pnevmatike 5%, diagonalne pa 8% (številke so izmišljene), ter da je moment (navor) avtomobila na kolesu zadosten da v pnevmatiko vnesemo največ 4% deformacije. To pomeni, da bi na podlagi brez ovir z obema pnevmatikama pospeševali enako hitro, tj. brez da bi se kolesi vrteli v prazno.
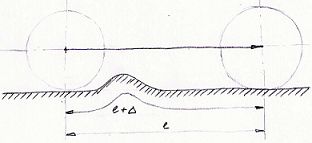
če pa na podlago dodamo grbino, ki bi v pnevmatiko vnesla še recimo 3% deformacije (ko gre pnevmatika čez grbino mora opraviti daljšo pot, zato se mora dodatno deformirati), bi to pomenilo da bi radialna pnevmatika zdrsnila (ker bi bila skupna deformacija večja kot jo guma dopušča), ter se začela vrteti v prazno (v diagramu bi šla ??�čez??� vrh največjega trenja), diagonalna pa bi nadaljevala s pospeševanjem, brez vrtenja v prazno.
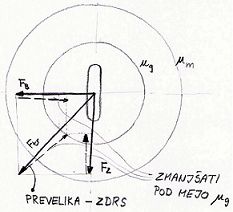
Ko enkrat premagamo silo trenja (lepenja) v eni smeri, je sila trenja (lepenja) premagana v vseh smereh.
Tukaj se lahko naredi preprost preizkus. Na neko strmino položimo nek predmet, ki dokler ga ne tikamo, na strmini miruje. Ta predmet nato začnemo potiskati v smeri vzporedno na strmino (vodoravna smer). Kaj se zgodi? Naš predmet začne drseti po klancu navzdol, čeprav ga v tej smeri ne potiskamo in je prej miroval.
Ta pojav je razlog za pravilo v vožnji skozi ovinke, ki pravi da je treba ovinke voziti brez ??�gasa??�.
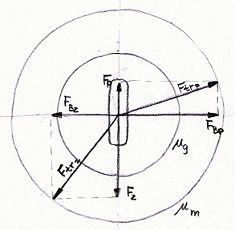
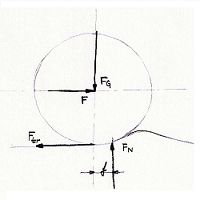
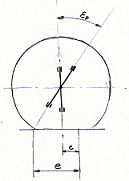
Na sliki predstavlja večji krog silo/koeficient trenja pri mirovanju (guma še ne drsi), manjši krog pa silo/koeficient trenja pri gibanju. Ko presežemo silo trenja pri mirovanju začne kolo drseti. če hočemo, da nazaj dosežemo oprijem brez drsenja moramo silo na kolo zmanjšati pod mejo trenja pri drsenju (ne pa pod mejo trenja pri mirovanju). To storimo tako, da zmanjšamo tangencialno silo na kolo (nehamo zavirati oz. pospeševati) ali pa zmanjšamo zasuk volana in tako zmanjšamo aksialno silo na kolo. Ko se kolo spet vrti brez drsenja lahko silo na kolo ponovno povečamo do meje trenja pri mirovanju.
Koeficient kotalnega trenja V začetku sem omenjal, da je koeficient kotalnega tenja posledica premika prijemališča sile podlage za razdaljo f. Zakaj se prijemališče sile premakne bom pa skušal razložiti sedaj.
Za razlago je ponovno najbolj primeren model iz začetka tega sestavka.
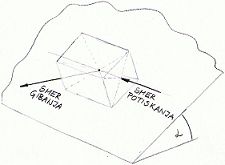
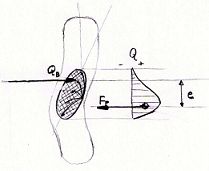
če gumo položimo na podlago ter jo obremenimo z silo, ki deluje navpično navzdol (teža recimo), brez da bi jo vrteli ali kamorkoli potiskali dobimo naslednjo razporeditev napetosti v gumi:
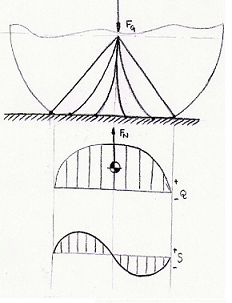
če bi za ta primer računali težišče lika pod krivuljo Q, bi to ležalo točno na sredini dotikalne površine pnevmatike z podlago, oziroma točno pod vrtiščno osjo kolesa, kar pomeni, da bi bil koeficient kotalnega trenja f enak 0.
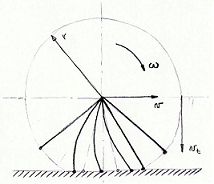
Sedaj začnemo kolo porivati v vodoravni smeri tako, da začne nakotaljevati. Stanje je sledeče:
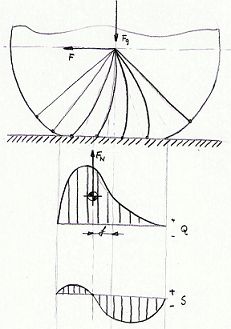
če sedaj preSlikamo krivuljo Q prek x osi (narišem mejo pri mirovanju in gibanju), ter jo položimo čez krivuljo S, lahko grafično določimo kolikšen del pnevmatike v oprijemu dejansko na podlagi miruje in kolikšen po podlagi drsi.
To si lahko predstavljamo tako, da do določene točke guma sprejema deformacijo, v naslednjem trenutku pa te deformacije ne more več absorbirati ter zdrsne. Od tu potem dobimo slip tornega gonila.
če sedaj predpostavimo še, da vozimo po cestišču kjer ostaja voda, se poleg znižanega koeficienta trenja zgodi še to, da nam prednji del pnevmatike (tisti ki ponavadi miruje, glej gornjo sliko) odriva vodo izpod gume, in zato ne leži še na podlagi. Pod tistim delom pnevmatike torej nimamo ne trenja pri mirovanju, ne trenja pri drsenju, temveč tekočinsko trenje, katero je sposobno prenašati še manjše sile kot trenje pri drsenju. čas oz. delež gume, ki izpodriva vodo je seveda odvisen od hitrosti. Pri zelo majhnih hitrostih se nahaja blizu nič, z večanjem hitrosti pa narašča dokler celotna pnevmatika ne izgubi stika z podlago. Takrat pride do znanega pojava, aquaplaninga.
Podobno velja za bočne oz. aksialne sile na kolo.
Ta razdalja se spreminja v odvisnosti kota zasuka volana ter hitrosti, in bi bila, pri večjih hitrostih celo negativna. To bi pa pomenilo da nebi mogli niti za trenutek izpustiti volana iz rok, saj bi se kolesa obrnila pravokotno na smer vožnje. Ta problem je rešen tako, da je prema koles nagnjena za določen kot nazaj, ter je razdalja e na ta način umetno povečana, s tem pridobimo na stabilnosti in občutku dogajanja pod kolesi.
Upam da je bilo branje zanimivo ter predvsem razumljivo. če karkoli ni jasno pa vprašajte, bom poizkusil razložiti.
Napiši komentar |
Komentarje lahko pišejo samo registrirani uporabniki.
Prijavite se!
Powered by AkoComment Tweaked Special Edition v.1.4.6
AkoComment © Copyright 2004 by Arthur Konze - www.mamboportal.com
All right reserved